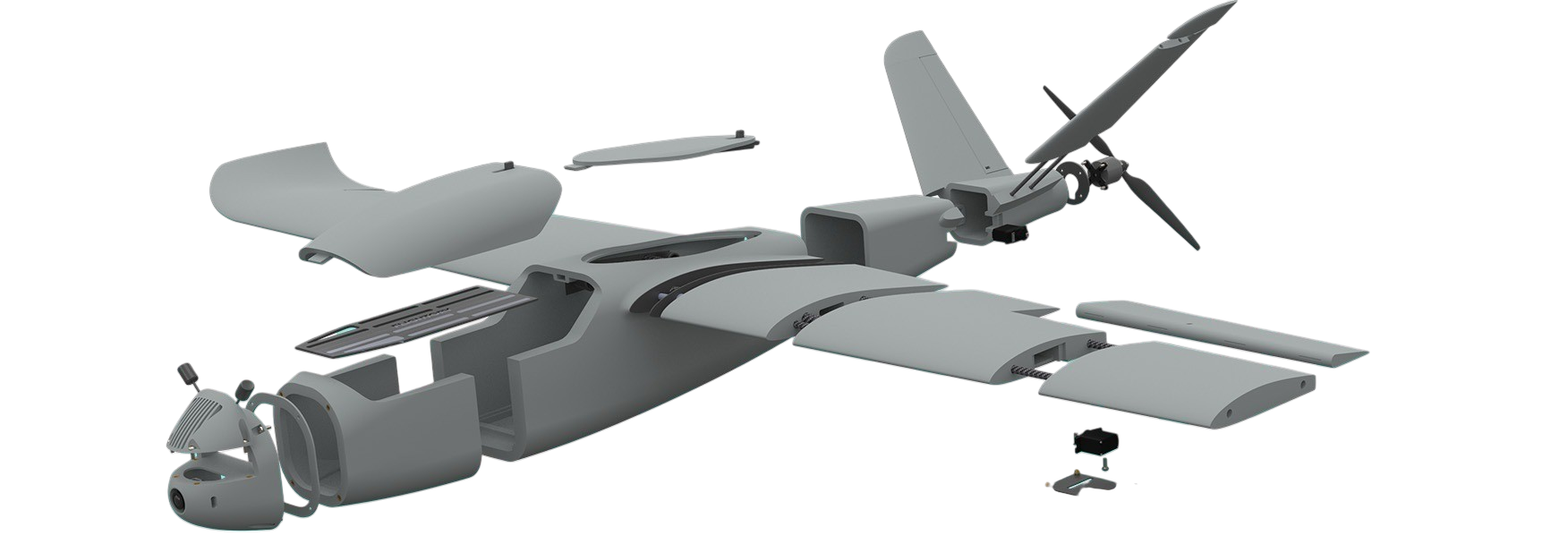
Visualiseur Modèle 3D
Inspectez le prototype V-1 sous tous les angles. Cliquez et glissez horizontalement sur l'image pour faire pivoter le modèle.
Objectifs de la Mission
Autonomie Supérieure
Atteindre une durée de vol continue de plus de 45 minutes.
Navigation Autonome
Implémenter une navigation par points de cheminement (waypoints) 100% autonome sur plus de 10 km.
Liaison Longue Portée
Transmettre un flux vidéo stabilisé en temps réel sur une distance de 5 km.
Reconnaissance IA
Développer un module IA embarqué pour la reconnaissance de formes simples (Phase 1).
Conception & Aérodynamique
Le choix d'une cellule de type **aile volante** n'est pas anodin. Cette configuration offre un ratio portance/traînée exceptionnel, maximisant l'efficience énergétique et donc l'autonomie. L'absence d'empennage réduit le poids et la complexité, mais représente un défi majeur en termes de stabilité, entièrement géré par le contrôleur de vol et ses mixages complexes (elevons).
Architecture Système & Électronique
Le projet VIGIL repose sur une architecture à "double cerveau" : un contrôleur de vol pour les tâches de pilotage en temps réel, et un ordinateur compagnon pour les calculs d'IA plus lourds.
Fiche Technique Détaillée
| Contrôleur de Vol | Matek F405-Wing (tournant sous ArduPilot) |
|---|---|
| GPS | Module M10 avec compas magnétoscopique |
| Ordinateur Compagnon | Raspberry Pi Zero 2 W |
| Motorisation | Moteur T-Motor 2814 1050KV avec hélice 10x6 |
| Batterie | Pack Li-Ion 4S 2P (6000mAh) fait sur mesure |
| Liaison Commande | ExpressLRS (ELRS) 915MHz |
Journal de Mission (Déclassifié)
Entrée 01 : Début du projet. Après simulations, la cellule Z-84 est retenue. Son profil aérodynamique est prometteur mais exigera un centrage méticuleux.
Entrée 02 : Câblage terminé. L'intégration du Raspberry Pi à côté du FC sans créer d'interférences électromagnétiques a été un véritable casse-tête. Le blindage est en place.
Entrée 03 : ÉCHEC - Premier test de puissance. Un BEC mal configuré a grillé. La "fumée magique" s'est échappée... Retour à l'atelier pour remplacer le composant et revoir le circuit d'alimentation.
Entrée 04 : SUCCÈS - Premier vol en mode manuel concluant ! L'avion est stable, le centrage est validé. L'appareil répond bien aux commandes.